强化学习三兄弟
哈喽,欢迎来到阿方小课堂,强化学习学的我晕乎乎的,下面我把自己这几天的理解收获整理一下,欢迎在评论区向我指出错误。
Q-learning与Sarsa
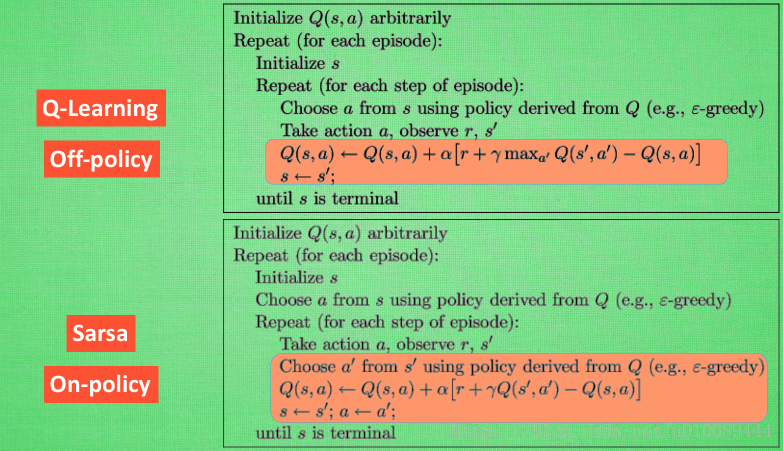
Q-learning是Off-policy(离线学习),而Sarsa是On-policy(在线学习),他们的区别是,Sarsa 是说到做到型,即边做边学;而Q-Learning是说到但并不一定做到,其可以通过观察别人的经历来学习。二话不说,贴出伪代码
其中,r表的含义在这,假设我们的 Q(s, a) 是一个 Q table,如下图所示,该表格表示共有三个 state (状态): S_1 、S_2、S_3 ,每个状态都有三个可选 action (动作) :a_1、a_2、a_3 ,对所有的状态-动作以0赋值:
| Q(s,a) | a_1 | a_2 | a_3 |
| :——- | :—: | :—: | —-: |
| S_1 | 0 | 0 | 0 |
| S_2 | 0 | 0 | 0 |
| S_3 | 0 | 0 | 0 |
Q-learning 算法和 Sarsa 算法都是从状态s开始,根据当前的 Q table 使用一定的策略(ε - greedy)选择一个动作$a$,然后观测到下一个状态s’,并再次根据 Q table 选择动作a’。
可以看出更新 Q(s, a) 需要用到下一个状态的动作a’,而两种算法的不同点正是选取a’的方法不同。
根据算法描述,在选择新状态s’的动作a’时,Q-learning使用贪心策略(greedy),即选取值最大的a’,此时只是计算出哪个a’可以使Q(s, a)取到最大值,然后更新Q table,并没有真正采用这个动作a’。贴出Q-learning更新Q table的代码。1
2
3
4
5
6
7
8
9
10
11
12for i in range(1000):
# 对每一个训练,随机选择一种状态
state = random.randint(0, 5)
while state != 5:
# 选择r表中非负的值的动作
r_pos_action = []
for action in range(6):
if r[state, action] >= 0:
r_pos_action.append(action)
next_state = r_pos_action[random.randint(0, len(r_pos_action) - 1)]
q[state, next_state] = r[state, next_state] + gamma * q[next_state].max()
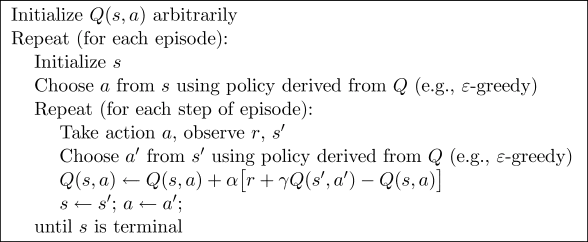
state = next_state而 Sarsa 则是仍使用ε - greedy策略,并真正采用了这个动作a’。代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24for i in range(100000):
# 对每一个训练,随机选择一种状态
state = random.randint(0, 5)
while state != 5:
# 选择r表中非负的值的动作
actions = []
for a in range(6):
if r[state, a] >= 0:
actions.append(a)
# 采取动作
action = actions[random.randint(0, len(actions) - 1)]
R = r[state, action]
next_state = action
actions = []
for a in range(6):
if r[next_state, a] >= 0:
actions.append(a)
# 采取相同的动作(sarsa核心)
next_action = actions[random.randint(0, len(actions) - 1)]
q[state, action] = R + gamma * q[next_state, next_action]
state = next_state
action = next_actionQ-Learning因为有了 maxQ,所以也是一个特别勇敢的算法,原因在于它永远都会选择最近的一条通往成功的道路,不管这条路会有多危险。而 Sarsa 则是相当保守,它会选择离危险远远的。
Sarsa与Sarsa-lambda
Sarsa-lambda与Sarsa相似,都是On-policy,但是在每次take action获得reward后,Sarsa只对前一步Q(s,a)进行更新,Sarsa-lambda则会对获得reward之前的步进行更新。它到终点后会再反过来看一下自己曾经走过的路。
大体上与Sarsa相同,只是增加一个指标,这样可以使学习效率变高,能更快速的达到目的Q表。
这个指标就是在获取到最终奖励时,也可以说是到达最终目的地时,各个位置的不可或缺性。
表示方法:
先定义一个E表,用来记录经过的位置,每走一步,如果这个点不在E表中,则添加这个点到E表中,并将这个E(s,a)的值改为+1(还可以优化,下面说),如果表中存在这个位置,则直接更新这个位置的值,然后在走下一步之前对E表进行整体衰减。也就是说每走一步,就要对E表的当前位置的值进行刷新,然后再进行衰减。衰减的意义就在于如果一旦到达终点,就可以体现出来E表中各个位置对到达终点的不可或缺性。如果衰减比例为0,也就是每次都给E表里的值乘0,就意味着表里最后就剩下一个离终点最近的位置了,如果为1呢,则E表里的重复的越多的位置收益越大(so,这不合理,需要优化),所以,衰减比例应该取一个0~1之间的数比较合理。
E表的用法就是在Sarsa的基础上,每次更新的时候加上这个E表里对应位置的值就可以了。这就是传说中的Sarsa lambda了。下面说一下如何优化:
前面我们说每次经过这个某个位置,都把E表里对应值+1,这样对有些位置会很不公平,可能会出现离终点最近的那个位置的E值比中间的某个点的E值还要低,这很不科学。优化办法就是给E里的值定个上限,每次走到这个位置,就把他重新定为1,然后从1开始衰减,这样就不会出现上述的bug了。
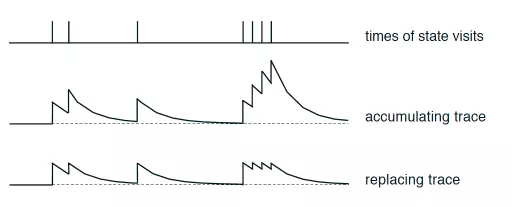
简单介绍一下图里的内容,第一行说的是某个位置出现和时间的关系;第二行说的是E值+1那个情况;第三行说的是定个上限为1的规矩。
总结
哇~强化三兄弟的介绍就这么结束了,对亏了简书,知乎,CSDN等论坛上的各路大神,贴上URL
https://zhuanlan.zhihu.com/p/29283927
https://blog.csdn.net/u010089444/article/details/80516345
https://www.jianshu.com/p/91fbc682fb3e
安呐~